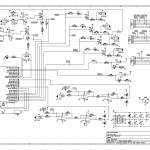
Here’s the code (and schematics) from the AniModule Gate_Mod
This is NOT the original code that shipped with the First Batch.
This is a Firmware Update.
The Original code had a bug in the delay out section that did not allow it to rest at 0V.
That has been fixed in this new revision 🙂
All Gate_Mods that shipped after Mid August 2015 have the new revision installed.
You can copy/paste directly to your Arduino IDE.
it won’t compile unless you have Paul Stoffregen’s digitalWriteFast Library installed. There’s a little more about this on the Schematics / Code page.
There are pads for a 5 pin header at the bottom right of the ATMEGA328.
Installing a Header here facilitates an ICSP to use upload sketches directly to the Module without having to pull the IC.
From top to bottom the pins connect to the ATMEGA328:
VCC (I’m using +5V)
VSS (GND)
TX
RX
Reset
You can connect directly from an Arduino with the IC removed to program it or use a USB to TTL converter etc.
The VCC is connected to the Modules +5V via a diode so no need to fear for your USB port if you forgot to disconnect your -/+12V EuroRack PSU before you connected your programmer 😉
If you make changes to the code, improvements, or come up with something interesting to do with the Gate_Mod I’d LOVE to hear about it! Please take the time to register and post up in the comments! You can also catch me via email, or PM / Post on Muff’s or Electro Music or the AniModule FaceBook Page.
gate_mod_2h
#include <digitalWriteFast.h> const int gateA = 2; const int gateOutA = 3; const int gateInvA = 4; const int AnInA = A0; const int bhvA = 9; const int gateB = 5; const int gateOutB = 6; const int gateInvB = 7; const int AnInB = A5; const int bhvB = 10; int invInterval = 10; // Variables // unsigned long gateTimeA = 0; int intervalA = 0; boolean inStateA = 0; boolean outStateA = 0; boolean resetA = 1; boolean bhvStateA = 0; boolean prevInStateA = 0; boolean invStateA = 0; boolean prevInvStateA = 0; unsigned long invTimeA; unsigned long gateTimeB = 0; int intervalB = 0; boolean inStateB = 0; boolean outStateB = 0; boolean resetB = 1; boolean bhvStateB = 0; boolean prevInStateB = 0; boolean invStateB = 0; boolean prevInvStateB = 0; unsigned long invTimeB; void setup(){ pinModeFast(gateOutA, OUTPUT); pinModeFast(gateInvA, OUTPUT); digitalWriteFast(gateOutA, LOW); digitalWriteFast(gateInvA, LOW); pinModeFast(gateOutB, OUTPUT); pinModeFast(gateInvB, OUTPUT); digitalWriteFast(gateOutB, LOW); digitalWriteFast(gateInvB, LOW); Serial.begin(9600); } void bhvfnA0(){ int cvA = analogRead(AnInA); /*Serial.println("cvA:"); Serial.println(cvA); cvA = analogRead(AnInA);*/ int intervalA = map(cvA, 0, 1024, 1, 1024 ) ; unsigned long intervalA10 = intervalA * 10; //int invMarkA = 0; if ((inStateA == 1) && (resetA == 1) && (prevInStateA != inStateA)){ resetA = 0; gateTimeA = millis(); invTimeA = millis(); outStateA = HIGH; digitalWriteFast(gateOutA, outStateA); } if ((millis() - invTimeA) <= (intervalA10)){ invStateA = LOW; digitalWriteFast(gateInvA, invStateA); } if ((millis() - gateTimeA) >= intervalA10) { outStateA = LOW; digitalWriteFast(gateOutA, outStateA); //invMarkA = 1; } if (((millis() - invTimeA) >= (intervalA10))&& ((millis() - invTimeA) <= (intervalA10 + invInterval))/*&& (invMarkA == 1)*/){ //Serial.println("gateInvA:"); Serial.println(gateInvA); invStateA = HIGH; digitalWriteFast(gateInvA, invStateA); } if ((millis() - invTimeA) >= (intervalA10 + invInterval)){ invStateA = LOW; digitalWriteFast(gateInvA, invStateA); resetA = 1; //invMarkA = 0; //Serial.println("gateInvA:"); //Serial.println(gateInvA); } prevInStateA = inStateA; } void bhvfnA1(){ int cvA = analogRead(AnInA); int intervalA = map(cvA, 0, 1024, 1, 1024 ) ; unsigned long intervalA10 = intervalA * 10; if ((inStateA == 1) && (prevInStateA != inStateA)){ gateTimeA = millis(); invTimeA = millis(); outStateA = HIGH; digitalWriteFast(gateOutA, outStateA); } if ((millis() - invTimeA) <= (intervalA10)){ invStateA = LOW; digitalWriteFast(gateInvA, invStateA); } if ((millis() - gateTimeA) >= intervalA10) { outStateA = LOW; digitalWriteFast(gateOutA, outStateA); } if ((millis() - invTimeA) >= (intervalA10)&& ((millis() - invTimeA) <= (intervalA10 + invInterval))){ //Serial.println("gateInvA:"); Serial.println(gateInvA); invStateA = HIGH; digitalWriteFast(gateInvA, invStateA); } if ((millis() - invTimeA) >= ( intervalA10 + invInterval)){ invStateA = LOW; digitalWriteFast(gateInvA, invStateA); //Serial.println("gateInvA:"); //Serial.println(gateInvA); } prevInStateA = inStateA; } void bhvfnB0(){ int cvB = analogRead(AnInB); int intervalB = map(cvB, 0, 1024, 1, 1024 ) ; unsigned long intervalB10 = intervalB * 10; if ((inStateB == 1) && (resetB == 1) && (prevInStateB != inStateB)){ resetB = 0; gateTimeB = millis(); invTimeB = millis(); outStateB = HIGH; digitalWriteFast(gateOutB, outStateB); } if ((millis() - invTimeB) <= (intervalB10)){ invStateB = LOW; digitalWriteFast(gateInvB, invStateB); } if ((millis() - gateTimeB) >= intervalB10) { outStateB = LOW; digitalWriteFast(gateOutB, outStateB); } if ((millis() - invTimeB) >= (intervalB10)&& ((millis() - invTimeB) <= (intervalB10 + invInterval))){ //Serial.println("gateInvB:"); Serial.println(gateInvB); invStateB = HIGH; digitalWriteFast(gateInvB, invStateB); } if ((millis() - invTimeB) >= (intervalB10 + invInterval)){ invStateB = LOW; digitalWriteFast(gateInvB, invStateB); resetB = 1; //Serial.println("gateInvB:"); //Serial.println(gateInvB); } prevInStateB = inStateB; } void bhvfnB1(){ int cvB = analogRead(AnInB); int intervalB = map(cvB, 0, 1024, 1, 1024 ) ; unsigned long intervalB10 = intervalB * 10; if ((inStateB == 1) && (prevInStateB != inStateB)){ gateTimeB = millis(); invTimeB = millis(); outStateB = HIGH; digitalWriteFast(gateOutB, outStateB); } if ((millis() - invTimeB) <= (intervalB10)){ invStateB = LOW; digitalWriteFast(gateInvB, invStateB); } if ((millis() - gateTimeB) >= intervalB10) { outStateB = LOW; digitalWriteFast(gateOutB, outStateB); } if ((millis() - invTimeB) >= (intervalB10)&& ((millis() - invTimeB) <= (intervalB10 + invInterval))){ //Serial.println("gateInvB:"); Serial.println(gateInvB); invStateB = HIGH; digitalWriteFast(gateInvB, invStateB); } if ((millis() - invTimeB) >= ( intervalB10 + invInterval)){ invStateB = LOW; digitalWriteFast(gateInvB, invStateB); //Serial.println("gateInvB:"); //Serial.println(gateInvB); } prevInStateB = inStateB; } void loop(){ bhvStateA = digitalReadFast(bhvA); inStateA = digitalReadFast(gateA); bhvStateB = digitalReadFast(bhvB); inStateB = digitalReadFast(gateB); if (bhvStateA == LOW){ bhvfnA0(); } if (bhvStateA == HIGH){ bhvfnA1(); } if (bhvStateB == LOW){ bhvfnB0(); } if (bhvStateB == HIGH){ bhvfnB1(); } }